Hydrobot GD Project. Step #1. Simplification
First of the series of posts related to Hydrobot GD project - Generative reDesign of underwater robotic system.
Intro
I've been invited by underwater engeneering company Hydrobot as an expert to embrace Generative Design technology in one of their solutions.
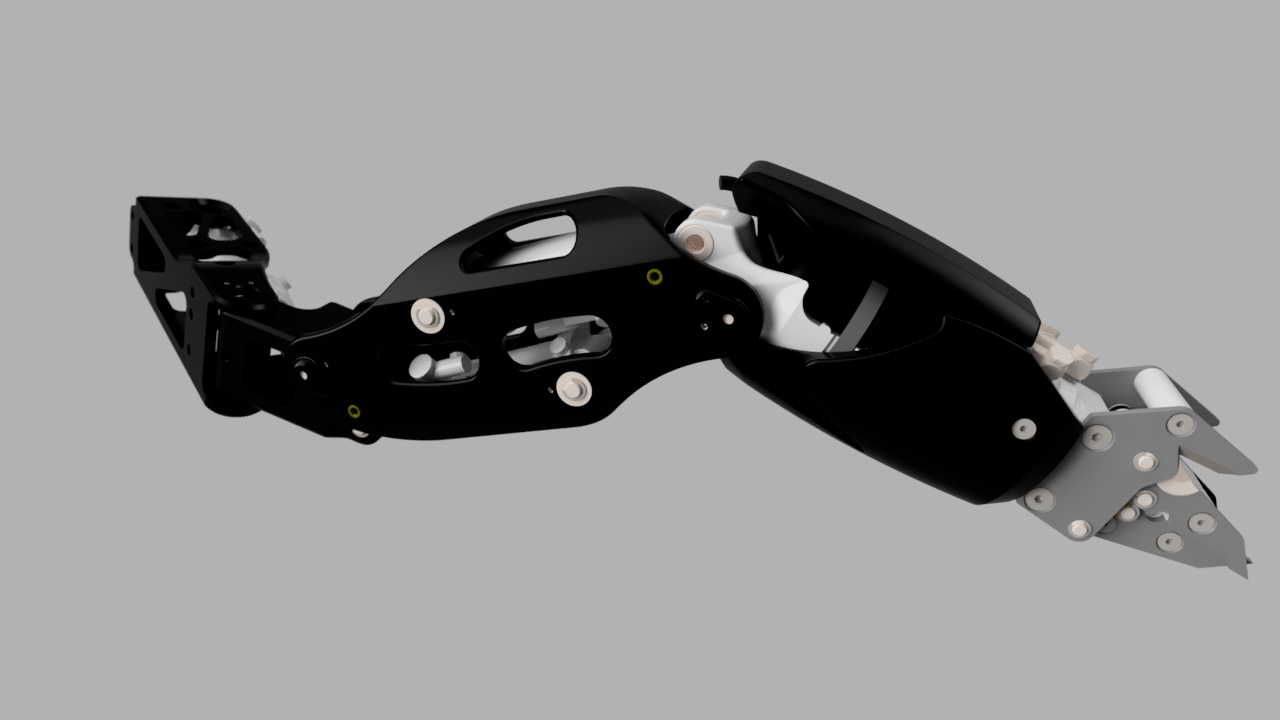
My role in this project is to redesign one of the parts of their underwater robotic system in order to improve reliability while reducing its weight and exploring material alternatives.
This project is going to engage Fusion 360 Generative Design solution to its full potential in order to design part to the expected loads while maintaining geometry consistent with the rest of the system.
Simplification
First step in nearly every project involving imported geometry is model simplification.
It's an important step that helps both focus on substantial features and ease further geometry processing.
Under the hood it looks like a pure deletion of fillets and holes, etc. However it must be held with great care and understanding what goes next.
Whenever simplified geometry should then be included in assembly it's crucial to preserve anchor features for joints. It's often performed by making sketches and joint origins before feature deletion.
I usually do this in non-parametric modeling in Fusion 360 as it has all the tools needed. In order to preserve initial geometry in case something goes wrong I make a copy in a separate component. That helps me to introduce like another "layer" of geometry while keeping the source intact.
Simplified part explained
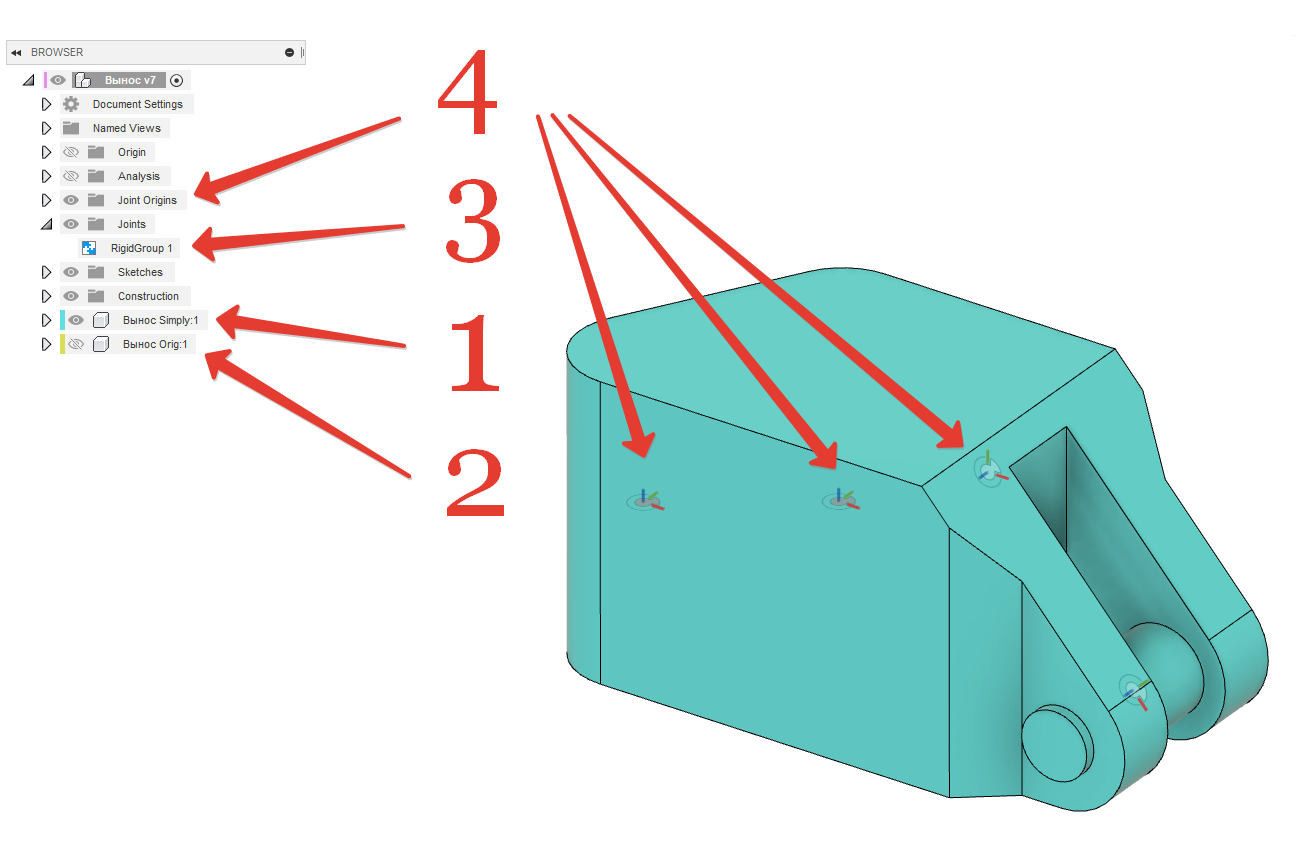
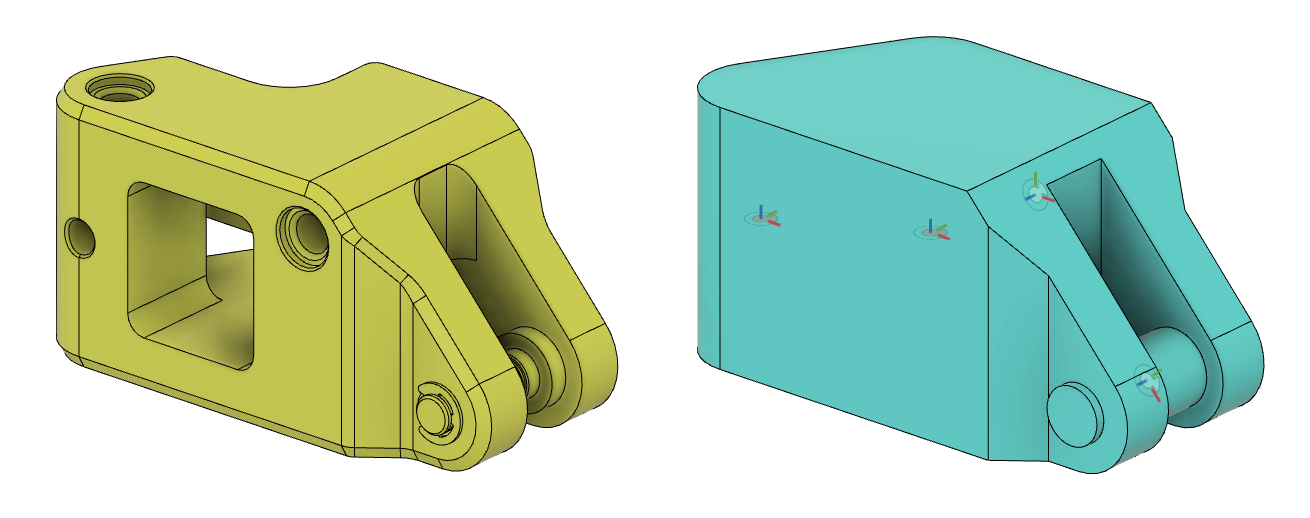
On the screenshot above you can see the structure of design that will be used in assembly and then further processed to become a part of geometry context for Generative Design study.
You can find (1) separate component containig simplified geometry as well as a (2) component with original imported part. Both held together with global origin (or root component) using (3) RigidGroup joint.
You can also see (4) four joint origins which then will be used in assembly as joints anchor points. Joint origins can be placed using sketches or original geometry as a reference in case their corresponding holes or features destroyed during simplification.